HüdrosilindridHüdrosilinder ja hüdromootor on hüdrosüsteemis asendamatud kompo-nendid, millede abil muudetakse hüdroenergia mehaaniliseks energiaks. Nagu hüdro-mootor, nii on ka hüdrosilinder ühendavaks lüliks hüdrosüsteemi ja tööorgani vahel. Erinevalt hüdro-mootorist, mille väljundiks on pöörlev liikumine, kasutatakse hüdrosilindreid kulgliikumise realiseerimiseks. Arvestamata hõõrdumist silindris sõltub silindri poolt arendatav maksimaalne jõud F töörõhust p ja kolvi efektiivsest pindalast A. F = p x A Juhul kui tööorgan kasutab funktsioneerimiseks kulgliikumist on hüdrosilindri kasutamisel järgnevad eelised: - antud juhtudel on silindri kasutamine mugav ja masinaehitaja poolt vaadatuna lihtne - kuna hüdroenergia muundamisel mehaaniliseks puudub vajadus kasutada vaheastmena pöörlevat liikumist, saavutatakse silindri kasutamisega, seadme kõrge kasutegur - silindri poolt arendatav jõud on konstantne kogu kolvi liikumisulatuses - samuti on konstantne kolvi liikumiskiirus, mis sõltub vedeliku vooluhulgast silindrisse ajaühikus ja kolvi pindalast - Sõltuvalt konstruktsioonist võimaldab silinder töötamist nii tõmbele kui tõukele - Kasutades hüdrosilindreid on võimalik ehitada seadmeid, milledel on suur võimsus, kuid väike mass ja gabariidid. Hüdrosilindrite tähtsamateks kasutus valdkondadeks on koormuste tõstmine ja langetamine, lukustus ja nihutus. Ühepoolse toimega hüdrosilindrid Vedruta ühepoolse toimega silinder Vedruta ühepoolse toimega silindris toimub kolvi liikumine ühes suunas hüdroenergia toimel, vastassuunas aga välise jõu mõjul. Ühepoolse toimega silindri korral räägitakse ühest kolvi efektiivsest pindalast. 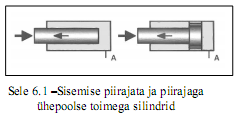 Vedruga ühepoolse toimega silindrid Vedruga tagastuvaid ühepoolse toimega silindreid kasutatakse kohtades, kus puudub väline jõud kolvi viimiseks lähteasendisse. Vedru võib paikneda nii silindris kui ka väljaspool silindrit. Kuna vedruga saab realiseerida vaid piiratud jõudu ja liikumisulatust on vedru kasutusel vaid lühikestes silindrites nagu näiteks kinnitussilindrid. 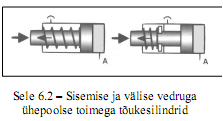 Juhul kui juhtida silindrisse läbi liite A surve all töövedelikku, liigub kolvivars silindrist välja, tagastumine toimub vedru toimel 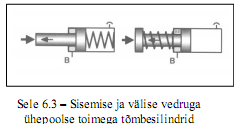 Juhul kui juhtida silindrisse läbi liite B surve all töövedelikku, liigub kolvivars silindrisse, tagastumine toimub vedruga Kahepoolse toimega silindri korral toimub kolvi liikumine mõlemas suunas töövedeliku toimel. Kahepoolse toimega silindrite korral räägitakse kahest omavahel võrdsest või erineva suurusega kolvi efektiivsest pindalast. 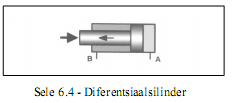 Diferentsiaalsilinder (ühe kolvivarrega) Enamikes hüdrosüsteemides kasutatakse silindreid milledel on üks kolvivars (sele 6.4). Silindri nimetus tuleneb kolvi erinevate poolte erinevast pindalast. Seda pindalade suhet tähistatakse . Sellistel silindritel on tänu kolvi erinevate poolte erinevatele pindaladele konstantse töörõhu korral tõukejõud kordaja võrra suurem kui tõmbejõud. Tänu kolvivarre mahule on erinevad ka silindripoolte ruumalad, mistõttu on erinevad ka kolvivarre sisse- ja väljaliikumise kiirused, kolvivarre väljaliikumiskiirus on väiksem kui kolvivarre sisseliikumiskiirus. Sümmeetriline silinder (läbiva kolvivarrega silinder) 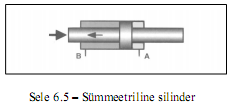 Sümmeetrilises silindris on kolvi erinevate poolte pindalad on võrdsed. Tänu sellele on konstantse töörõhu korral võrdsed kolvi poolt arendatavad erisuunalised jõud ja ka kolvi liikumiskiirused. Eritellimusel võidakse valmistada ka sümmeetrilisi silindreid, milledel on kolvivarte läbimõõdud erinevatel kolvi pooltel erinevad , ning nende silindrite kohta kehtib sama, mis diferentsiaal-silindri kohta 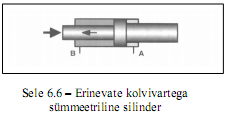 Erikonstruktsiooniga silindrid Sageli tekib olukordi, kus standardsete ühe- ja kahepoolse toimega silindrite kasutamine on võimalik vaid eriliste lisakonstruktsioonide abil. Tüüpilisemad sellistest olukordadest on näiteks olukord, kui on vaja saavutada suurt kolvivarre liikumisulatust silindri minimaalse pikkuse juures või saavutada suuri jõude kolvi minimaalse läbimõõdu juures. 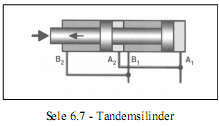 Kahepoolse toimega tandemsilindris on tegemist kahe silindriga, mis on teineteisega seotud niimoodi, et teise silindri kolvivars on läbi esimese silindri tagakaane seotud esimese silindri kolviga. Sellise konstruktsiooni korral silindrite kolbide efektiivsed pindalad summeeruvad, võimaldades arendada suuri jõude kolvi väikese diameetri korral. Sellise silindri kasutamisel tuleb aga arvestada sellise silindri suuremat pikkust. Kahejärguline silinder (ühepoolse toimega) Kahejärgulised silindrid on kasutusel näiteks pressides. Sellistes silindrites juhitakse 1. järgus töövedeliku rõhk ainult osale kolvi efektiivsest pindalast (nn. kiirliikumisega kolvivars), seda seni kuni ei vajata täisjõudu. 2. järgus aga juhitakse töövedeliku rõhk kolvi kogupindalale kasutades selleks rõhuventiile või teekonnalüliteid koos juhtimissüsteemiga. Selliste silindrite eeliseks on: - kolvivarre kiire liikumine tänu silindri väikesele ruumalale 1. järgus - tekitatav suur jõud tänu kolvi suurele efektiivsele pindalale 2. järgus. Selliseid silindreid on kahte tüüpi. Ühepoolse toimega silindrites toimub kolvi kiirliikumine kui töövedelik juhitakse silindrisse liiteava A1 kaudu. 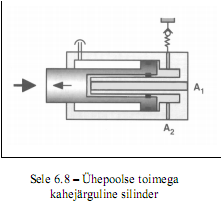 Maksimaalne jõud saavutatakse siis kui töövedelik juhitakse silindrisse liiteava A2 kaudu Tagastusliikumine toimub kolvi enda kaalu või välise jõu mõjul. Kahejärguline silinder (kahepoolse toimega) Kahepoolse toimega silindrites toimub kolvivarre väljaliikumine samuti kui ühepoolse toimega silindrites. Kolvi tagastusliikumine toimub kui töövedelik juhitakse silindrisse liiteava B kaudu. 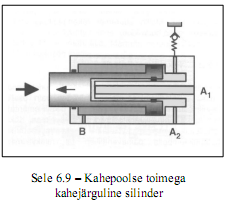 Teleskoopsilinder (ühepoolse toimega) Teleskoopsilindrid erinevad “tavalistest” silindritest selle poolest, et võrreldes viimastega on nad samasuguse kolvi-varre liikumisulatuse juures märksa lühemad. Teleskoopsilindri kolvivars koosneb lülidest, tänu millele on kolvivarre liikumisulatus võrdne ligikaudu ühe lüli pikkuse korrutisega lülide arvuga. Teleskoopsilindreid on olemas nii kahe-, kolme, nelja ja viie lüliga. Neid kasutatakse hüdraulilistes liftides, tõstukites, erinevates antenni-konstruktsioonides jne. Ka teleskoopsilindreid on kahte tüüpi. Ühepoolse toimega silindrites 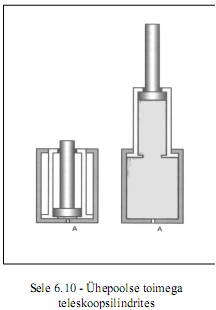 Kui silindrisse juhtida töövedelikku liiteava A kaudu alustavad kolvivarre lülid üksteise järel liikumist kolvist välja. Rõhk silindris sõltub koormusest kolvivarrele ja kolvi lülide efektiivsest pindalast. Esimesena alustab liikumist kolvivarre see lüli mille efektiivne pindala on suurim. Töövedeliku konstantse rõhu ja vooluhulga juures algab kolvivarre lülide liikumine maksimaalse jõu ja mini-maalse kiirusega. Kolvivarre liikumine lõpeb maksimaalse kiirusega ja minimaalse jõuga. Ühepoolse toimega silindris toimub kolvivarre lülide liikumine lähteasendisse välise jõu mõjul vastupidises järjekorras (väiksema efektiivse pindalaga lüli liigub tagasi esimesena). 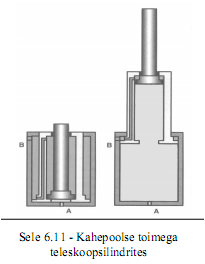 Teleskoopsilinder (kahepoolse toimega) Kahepoolse toimega teleskoopsilindris toimub tööliikumine samamoodi kui ühepoolse toimega teleskoopsilindris. Kolvivarre üksikute lülide tagasi-liikumise järjestus sõltub nende rõngas-pindade suurusest. Juhtides töövedelikku silindrisse liiteava B kaudu, alustab esimesena liikumist lüli mille rõngaspind on suurim. Kahepoolse toimega teleskoopsilindreid valmis-tatakse ka konstantse kolvivarre liikumiskiirusega. Sellistes silindrites alustavad kolvivarre kõik lülid liikumist nii sisse kui välja üheaegselt. 6.4 Amortisaatoritega hüdrosilindrid Selleks, et vähendada silindris tekkivaid lööke kolvi jõudmisel piirasenditesse varustatakse silindrid amortisaatoritega, seda kas ühes või mõlemas piirasendis Tänu amortisaatoritele toimub kolvi liikumiskiiruse aeglustamine kolvi lähenemisel piirasendisse. Amortisaatori ehitus Lisaks kolvile 1 on kolvivarre külge kinnitatud amortisaatori kolb 2 (sele 6.13). Kolvi lähenemisel piirasendile suleb amortisaatori kolb töövedeliku vaba väljavoolu silindrist, jättes vabaks ainult vedeliku väljavoolu läbi kanali 5 ja reguleeritava drosseli 6. Drosseliga reguleeritakse pidurdamise määr, mida suurem on drosseli läbivool seda väiksem on amortisaatori mõju kolvi liikumisele 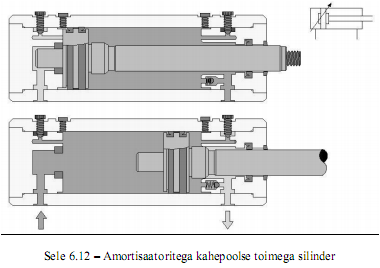 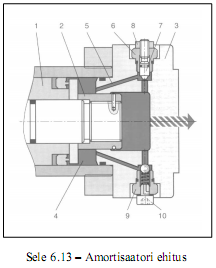 Drosseli ehitus võimaldab lukustada reguleerimiskruvi 7 asendit lukustus-mutri 8 abil. Mittetagasivoolu ventiili 9 abil tagatakse kolvi maksimaalne liikumiskiirus kohe liikumise alguses. Silindrisse kogunenud õhku saab eemaldada kruvi 10 abil. 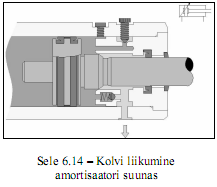 Silindrites, kus amortisaatorid puuduvad on alati õhu eemalduskruvi. 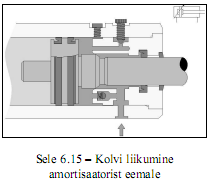 Hüdrosilindrite kasutamine Kolvivarre läbipaindumine Suure kolvi liikumisulatusega silindrite kasutamisel tekib teatavaid probleeme. Nimelt tekib pikkade silindrite kasutamisel kolvivarre läbipaindumise oht. Silindri maksimaalse koormuse arvutamisel lähtutakse eeldusest, et kolvivart võib vaadelda kui peenikest elastset varrast ja kasutada selleks Euleri valemit. Deformatsiooni tekitamiseks vajalik koormus leitakse järgmiselt: K = (pii x E x J) / Sk2 [N] Sellisel koormusel tekib juba kolvivarre deformatsioon! Suurim lubatud koormus silindri kasutamisel leitakse F = K / S [N] SK = paindumisulatus [mm] E = (terasel 2,1 x 105) [N/mm2] J = inertsmoment [mm4] = (d4 x pii)/64 = 0,0491 x d4 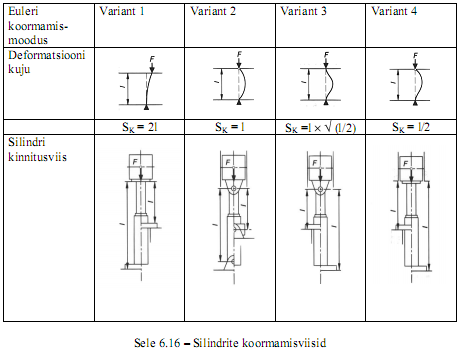 |
Seaded |
|
Viimane uuendus: 17.10.2012 20:22:48 |

Kontakt |
| Pärnumaa Kutsehariduskeskus |
powered by cmsimple.dk
- template by cmsimple-styles.com |