HüdropumbadPumpadele esitatavad nõuded Hüdropumpadele esitatavaid nõudeid võib kokku võtta ühe lausega: Hüdropump peab muutma mehaanilise energia (pöördemoment, pöörlemis-kiirus) hüdrauliliseks energiaks (vedeliku voolamine, rõhk). Praktikas on aga pumpadele esitatavad nõudeid rohkem. Hüdropumpa valikul tuleb arvestada järgmisi nõudmisi: • kasutatav töövedelik • töörõhkude diapasoon • oletuslik pöörlemiskiirus • minimaalne ja maksimaalne töötemperatuur • töövedeliku minimaalne ja maksimaalne viskoossus • paigaldus (torustike ühendus jne.) • tööorgani tüüp • oletuslik tööiga • maksimaalne müratase • hoolduse lihtsus • lõplik oletuslik maksimaalne hind Seda nõuete loetelu on võimalik jätkata. Nõudmiste erisus näitab, et kõik pumbad ei vasta kõikidele nõudmistele ja pumba valikul tuleb leida kompromiss erinevate nõudmiste vahel. Sellel põhjusel ongi praktikas kasutusel erineva konstrukt-siooniga pumpasid. Ühine neile kõigile on see, et nende töötamispõhimõtteks on töövedeliku kokkusurumineja see, et neis kõigis on tegemist mehaaniliselt tihendatud töökambritega. Läbi nende toimub töövedeliku juhtimine sissevooluavast väljavooluavasse. Kuna pumpades puudub töövedeliku vaba vool nende kahe ava vahel, vähendatakse pumbas töövedeliku ruumala, mille tulemusel tekitatakse rõhk. Seetõttu on nad eriti sobivad suurte rõhkude saamiseks, ning eriti sobivad kasutamiseks hüdrosüsteemides. Hüdropumpade põhikonstruktsioonid Hammasrataspump (välihambumisega) 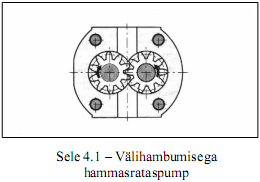 Pumba töökamber moodustub hammas-rataste ja pumba korpuse vahel. Pumba töömaht: V = m x z x b x h x pii m = hammasrataste moodul z = hammaste arv b = hamba laius h = hamba kõrgus Hammasrataspump (sisehambumisega) 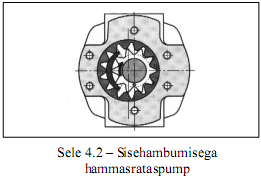 Pumba töökamber moodustub hammas-ratta ja eraldusplaadi vahel. Pumba töömaht: V = m x z x b x h x pii m = hammasratta moodul z = hammaste arv b = hamba laius h = hamba kõrgus Hammasvõrupump 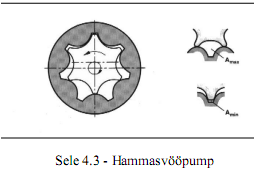 Rootoril on üks hammas vähem sise-hammastusega staatoril. Pumba töömaht: V= z x (Amax - Amin) x b z = rootori hammaste arv b = hamba laius Kruvipump 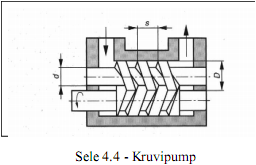 Pumba töökamber moodustub tigu-kruvide keermete ja pumba korpuse vahel. Pumba töömaht: V= Pii /4 x (D2 - d2)x s - D2 ( alfa/2 - sin 2alfa / 2)x s : cos alfa = (D + d) / 2D Ühepoolne labapump 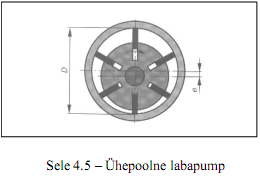 Töökambrid moodustuvad staatori, rootori ja labade vahel. Pumba töömaht: V= (4 x pii x rm- a x z) x b x e b = labade laius e = tsentrite vahe rm = (D + d)/ 4 e = (D + d) / 2 Kahepoolne labapump 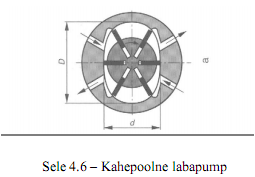 Staatori kuju tõttu moodustub selles pumbas kaks töö poolt. Pumba töö-maht: V = k x b ( pii /4 x (D2 – d2) - (D2 - d2) x a x z) b = labade laius k = laba liikumisulatus ühe pöörde kestel Radiaalkolbpump (ekstsentrilise silindriteplokiga) 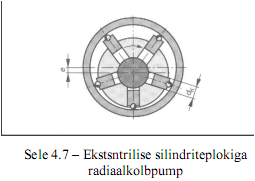 Kolbide pead liiguvad pumba telje pöörlemisel mööda pumba korpuse sisepinda. Ekstsentrilisus e määrab ära kolbide liikumisulatuse. Pumba töömaht: V = (dk2 x pii) 7 4 x 2e x z z = silindrite arv Radiaalkolbpump (ekstsentrilise teljega) 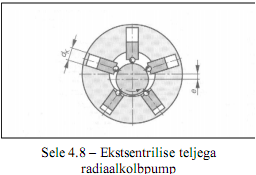 Ekstsentriline telg tekitab pumba kolbide liikumise. Pumba töömaht: V = (dk2 x pii) /4 x 2e x z z = silindrite arv Aksiaalkolbpump (pööratud silindriteplokiga) 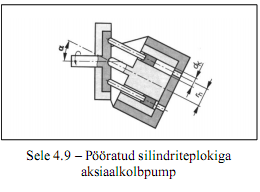 Pumba telje pöörlemisel sooritavad kolvid edasi-tagasi liikumist, mille ulatuse määrab ära silindriteploki kaldenurk. Pumba töömaht: V = (dk2 x pii) / 4 x 2rh x z x sin alfa z = silindrite arv Aksiaalkolbpump (kaldplaadiga) 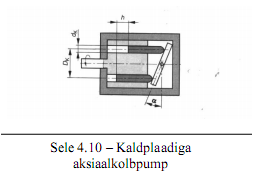 Pöörlevas silindriteplokis asuvad kolvid toetuvad vastu kaldplaati, mille kaldenurk määrab ära kolbide liikumisulatuse. Pumba töömaht: V = (dk2 x pii) / 4 x DK x z x tan alfa Laba- ja kolbpumbad võivad olla nii konstantse kui ka reguleeritava töömahuga. Hammasrataspumpade töö-maht on aga konstantne. 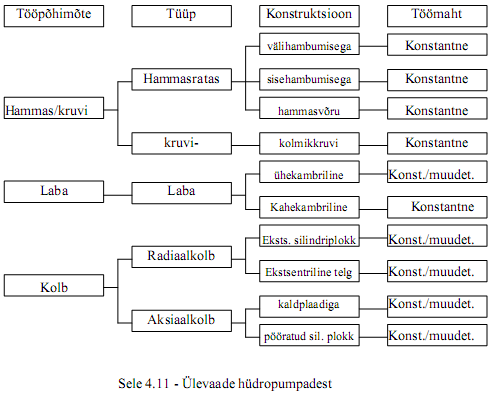 Pumpade valikukriteeriumid Pildil on võrreldud erinevat tüüpi hüdropumpade valikukriteeriume. Järgnevalt ongi ära toodud kokkuvõte erinevate hüdropumpade omadustest. Kasutatud hinnangute skaala on järgnev: 1 = eriti hea/eriti suur 2 = hea/suur 3 = rahuldav 4 = nõrk Optimaalse valiku tegemiseks tuleb tähelepanelikult võrrelda omavahel valitud pumba parameetreid teiste pumpade parameetritega. Kuna valikukriteeriumid sõltuvad lisaks veel konkreetsest rakendusest saab antud tabelit kasutada valiku tegemiseks vaid selliste kriteeriumite puhul nagu tööiga ja müratase. 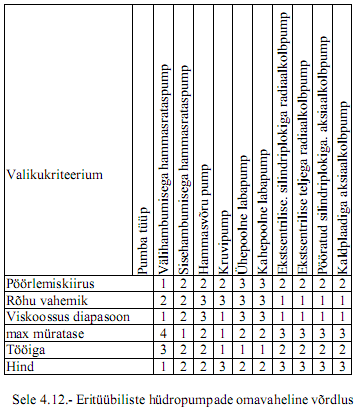 Hüdropumpade tööpõhimõtted Kruvipump 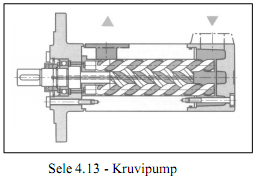 Tänu kruvipumpade äärmiselt madalale müratasemele kasutatakse neid laialdaselt teatrite ja kontserdisaalide lavaseadmete hüdrosüsteemides. Kruvipumba korpuses paikneb 2 või 3 kruvi. Pumba ajami telg on ühendatud ühe päripäeva keermega kruviga, mis kannab pöörlemise edasi järgmistele vastupäeva keermega kruvidele. Kruvide keermete vahel moodustuvad püsiva ruumalaga suletud kambrid, mis liiguvad pumba sisselaskeava poolt väljalaskeava poole. Sellisel moel saavutatakse ühtlane töövedeliku voolamine, tänu millele ongi kruvipumba müratase äärmiselt madal. Põhiparameetrid Töömaht 15 - 3500 cm3 Töörõhk < 200 bar Pöörlemiskiirus 1000 – 3500 min-1 Välihambumisega hammasrataspump 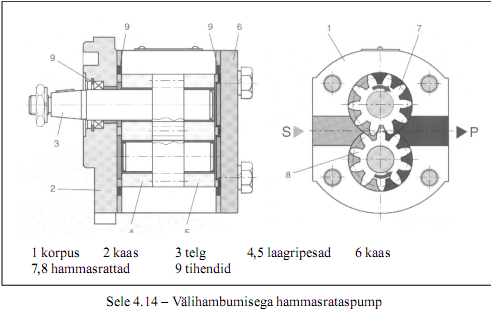 Seda tüüpi hammaspumpasid kasutatakse laialdaselt mobiilsetes hüdraulikaseadmetes ja seda järgnevatel põhjustel: - suhteliselt kõrge väljundrõhk vaatamata pumba väiksele kaalule - madal hind - suur pööretevahemik - lai töötemperatuuri ja pumbatava vedeliku viskoossuse vahemik Hammasratas 7 on seotud telje 3 vahendusel pumba ajamiga (elektrimootor, diiselmootor jne.). Hammasrattad 7 ja 8 on seotud omavahel minimaalse lõtkuga. Kui süsteem käivitatakse liigub sisselasketorus olev vedelik läbi pumba tekitades sisselaskeavas S alarõhu, mille toimel imetakse töövedelik reservuaarist pumpa. Seejärel surutakse vedelik pumba korpuse ja hammasrataste vahele jäävas ruumalas väljavooluavasse. Põhiparameetrid Töömaht 0,2 – 200 cm3 Töörõhk < 300 bar (sõltub pumba mõõtmetest) Pöörlemiskiirus 500 – 6000 min-1 Sisehambumisega hammasrataspump 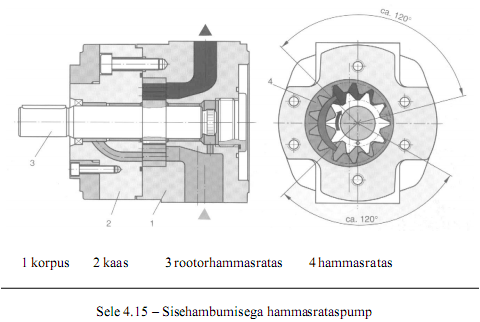 Sisehambumisega hammasrataspumpade tähtsaim omadus on nende väga madal müratase, mistõttu on nad kasutusel tööstuses kasutatavates hüdraulikaseadmetes (pressid, stantsid, jne) ja mobiilsetes hüdraulikaseadmetes, mis on kasutusel sisetingimustes. Rootorhammasratas on seotud pumba ajamiga. Nende hammasrataste pöörlemisel suureneb hammastevaheline ruumala (toimub imemine). Selline ruumala suurenemine toimub 120 pöördenurga ulatuses, millega tagatakse õli sujuv imemine pumpa. Järgnevalt jääb hammastevaheline ruumala konstantseks. Edasi toimub hammastevahelise ruumala sujuv vähenemine ja töövedelik surutakse väljavooluavasse. Kirjeldatud hammas-rataspumbad ei tekita hüdraulilisi lööke ja ning töötavad sellepärast eriti madala müratasemega. Põhiparameetrid Töömaht 3 – 250 cm3 Töörõhk < 300 bar (sõltub pumba mõõtmetest) Pöörlemiskiirus 500 – 3000 min-1 (sõltub pumba mõõtmetest) Radiaalkolbpumbad Radiaalkolbpumpi kasutatakse hüdro-süsteemides kus vajatakse kõrget töö-rõhku (> 400 bar). Mõningates tööstus-seadmetes (stantsid, pressid) on kasu-tusel töörõhk kuni 700 bar. Sellistes tingimustes on võimelised kestvalt töötama ainult radiaalkolbpumbad. Ekstsentrilise teljega, klappidega juhitav radiaalkolbpump töötab järgnevalt: Pumba telg 1 on paigaldatud nihkes pumba kolbide 2 suhtes. Pumba tööorganiteks on silindri korpus 4, sfääriline laagripind 5, vedru 6, sisselaskeklapp 7 ja väljalaskeklapp 8. Sfääriline laagripind on kinnitatud keermesliitega pumba korpusesse 9. Kolb toetub pumba telje liugpinnale. tänu vedrule püsib kolb alati vastu liugpinda ja silindri korpus sfäärilise laagripinna vastas. Kolbpumpades on kasutusel paaritu arv silindreid, sest vastasel korral muutub pumbast väljuv vedeliku vool ebaühtlaseks . Pumba tööpõhimõte etappide kaupa on äratoodud . Põhiparameetrid: Töömaht 0,5 – 100 cm3 Töörõhk < 700 bar (sõltub pumba mõõtmetest) Pöörlemiskiirus 1000 – 3000 min-1 (sõltub pumba mõõtmetest) 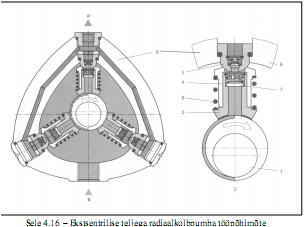 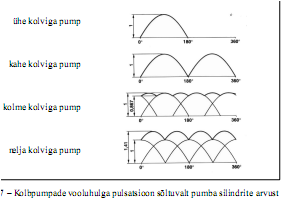 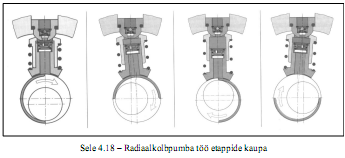 1.etapp Kolb on ülemises surnud seisus, silindri ruumala on minimaalne , sisse- ja välja-laskeklapid on suletud. 2.etapp Telje pöörle-misel liigub silinder pumba tsentri suunas, silindri ruumala suureneb, ala-rõhu mõjul avaneb sisselaskeklapp, vedelik voolab pumba teljel oleva soone kaudu silindrisse. 3.etapp Kolb on alumises surnud seisus, silindri ruumala on maksimaalne, sisselaske- ja väljalaskeklapid on suletud. 4.etapp Telje pöörlemisel liigub kolb sfäärilise laagri suunas, silindri ruumala väheneb, ülerõhu mõjul avaneb väljalaskeklapp ja vedelik surutakse pumba korpuses asuvasse kanalisse. Labapumbad  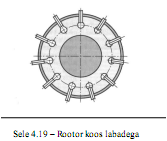 Labapumpasid on kahte tüüpi: - ühepoolsed - kahepoolsed. Mõlemat tüüpi pumpade põhi-komponendid on samad, milleks on rootor koos labadega (sele 4.19). Labad saavad rootoris liikuda radiaalsuunas, erinevus tüüpide vahel seisneb erineva kujuga staatoris, mis piirab labade liikumisulatust. Kahepoolne labapump  Kahepoolse labapumba korpuse ristlõige on seespoolt ellipsi kujuline, mistõttu teeb iga laba rootori pöörde jooksul kaks edasi-tagasi liikumist. Survekambrid moodustuvad rootori, kahe laba, staatori sisepinna ja külgplaatide vahele jäävas ruumalas. Punktis, kus rootori ja staatori vahemaa on minimaalne , on ka survekambrite ruumala minimaalne. Rootori pöördumisel kambrite ruumala suureneb tekitades alarõhu, tänu millele imetakse sissevooluavast vedelik pumpa. Kuna labad on staatori sisepinnaga pidevas kontaktis on kambrid omavahel eraldatud. Kui survekamber on saavutanud maksimaalse ruumala katkeb kambril ühendus sissevooluavaga 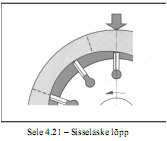 Rootori edasisel pöördumisel toimub survekambri ruumala vähenemine. Pumba staatoris olevate uurete kaudu surutakse vedelik väljavooluavasse 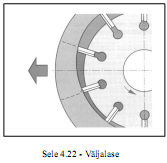 Kahepoolsetes labapumpades toimub see protsess pumba telje ühe pöörde jooksul kaks korda 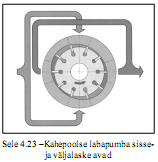 Selleks, et garanteerida labade kindel liibumine vastu staatori sisepinda rakendatakse labadele survet, tuues labade alla surve all oleva töövedelik, seega surutakse laba vastu staatori sisepinda jõuga, mis võrdub töövedeliku rõhu ja laba ristlõikepindala korrutisega. 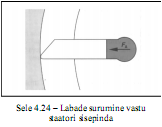 Sõltuvalt pumbatava töövedeliku määrimis-omadustest põhjustab selline täiendav surve labade kulumist ja suurendab hõõrdumist. Selle vähendamiseks pumpades kus väljundrõhk ületab 150 bar, kasutatakse erilisi labasid (sele 4.25 ja 4.26), kus surve all olev vedelik juhitakse laba ja staatori vahele piki labades asuvaid kanaleid. Tänu efektiivsete pindalade A1 ja A erinevusele on FA1 väiksem kui FA. Sellega kompenseeritakse osaliselt labade surve staatori sisepinnale. 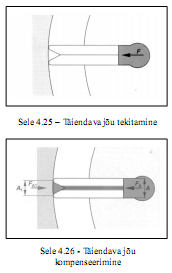 Ühepoolne labapump Ühepoolse labapumba staatori ristlõige on seestpoolt ringi-kujuline. Kuna rootori ja staatori teljed ei lange kokku põhjustab see analoogiliselt kahepoolsetele pumpadele rootori pöörlemisel survekambrite ruumala muutumist. Vedeliku sisse- ja väljalase toimub ühe- ja kahepoolses pumbas analoogiliselt. 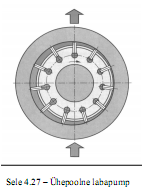 Reguleeritavad labapumbad Vahetu töömahu reguleerimisega labapump Antud pumbas saab rootori asendit staatori suhtes muuta kolmest erinevast punktist: - Pumba töömahu reguleerimiskruvi 1. Rootori ja staatori omavaheline kaugus mõjutab vahetult pumba tootlikkust. - Rootori kõrguse reguleerimiskruvi 2. Muutes rootori asendit püstsihis muutub pumba müratase ja dünaamika. - Pumba maksimaalse väljundrõhu reguleerimiskruvi 3, (vedru pingsus mõjub pumba väljundrõhu suurusele). Töötavas hüdrosüsteemis moodustub rõhk, mille suurus sõltub süsteemis olevatest voolutakistustest. See rõhk mõjub pumba väljalaskeava kaudu ka pumba staatori sisepinnale, tekitades pumbas jõu Fp. Kui jaotada see jõuvektor kaheks saame jõu Fv (mida kompenseeritakse rootori kõrguse reguleerimise kruviga) ja jõu Fh, mis mõjub vedrule. Niikaua kuni vedru elastsusjõud Ff on suurem kui jõud Fh püsib staator joonisel toodud asendis. Rõhu tõustes suureneb jõud Fp ja koos sellega ka tema komponendid Fv ja Fh. Kui jõud Fh ületab ületab jõu Ff nihkub staator paremale, survekambrite ruumala väheneb ja koos sellega ka pumba tootlikkus. Survekambrite ruumala võib väheneda nii palju et pumba tootlikkus muutub nulliks. 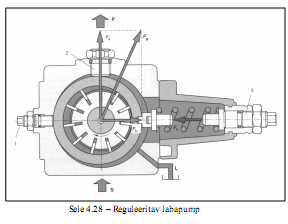 Pump hoiab niimoodi hüdrosüsteemi rõhu konstantsena. Rõhu suurust saab muuta vedru pingsuse reguleerimisega Sellistes pumpades on alati ka vedeliku äravoolukanalid. Nende kaudu voolav vedelik juhitakse tagasi reservuaari. Nulltootlikkuse olukorras juhitakse niimoodi pumbast välja hõõrdumisel tekkiv soojus ja tagatakse pumba komponentide õlitus. Pumba põhiparameetrid Töömaht 5-100 cm3 Töörõhk < 100 bar Pöörlemiskiirus 1000-2000 min-1 Võimendusega töömahu regulaatoriga labapump Antud pumba tööpõhimõte on samasugune kui vahetu töömahu regulaatoriga pumbal, erinevused on ainult staatori asendi juhtimises. Staatori asendi muutmine ei toimu mitte vedru mõjul, vaid kahe reguleerimissilindri abil. Nende kahe silindri kolvid on erinevad pindalaga (suhe 2:1). Suurema pindalaga kolb on koormatud vedruga mis tagab, pumba käivitamisel staatori nihutatud asendi. Hüdrosüsteemi töörõhk juhitakse väiksemasse silindrisse otse, suuremasse aga läbi regulaatori R. Kui rõhud mõlemas silindris on võrdsed püsib staator kolbide erineva pindala tõttu joonisel näidatud asendis. 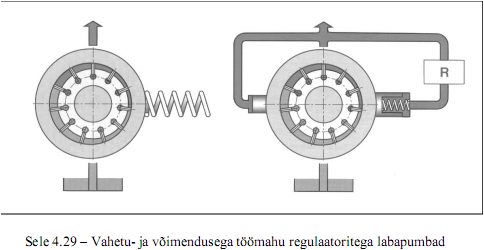 Rõhuregulaatori ülesanded Rõhuregulaatori ülesandeks on vältida hüdrosüsteemi töörõhu suurenemist üle maksimaalse lubatud väärtuse. Rõhuregulaatorile esitatakse järgnevad nõudmised: - Hea dünaamika Rõhuregulaator peaks olema võimalikult kiiretoimeline (50-500 ms). Dünaamilised omadused sõltuvad pumba tüübist, regulaatorist ja hüdrosüsteemist - Stabiilsus Kõikides hüdrosüsteemides, kus toimub töörõhu reguleerimine, kipub töörõhu suurus võnkuma. Regulaatoris tuleb leida kompromiss hea dünaamika ja stabiilsuse vahel. - Kasutegur Regulaatori töötamisel liigub osa töö-vedelikust läbi regulaatori tagasi otse reservuaari. Selline kadu peaks olema minimaalne, kuid sealjuures tuleb silmas pidada ka regulaatori dünaamikat ja stabiilsust. Rõhuregulaatori ehitus Rõhuregulaator põhikomponentideks on reguleerimiskolb 1, korpus 2, vedru 3 ja eelpingutusseade 4. Regulaatori lähteasendis surub vedru regulaatori kolvi joonisel näidatud asendisse. mööda pumba kanaleid voolab töövedelik regulaatori kolvile, millesse on puuritud üks pikikanal ja kaks sellega risti olevat avaust. Läbi kolvi voolavat vedeliku hulka piiratakse lisaks veel düüsiga. Selel 4.30 näidatud kolvi asendis pääseb vedelik läbi kolvis olevate kanalite suuremasse silindrisse. 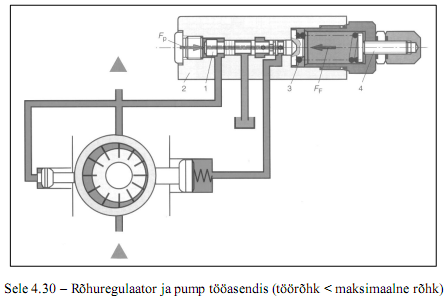 Antud asendis suleb reguleerimiskolb vedeliku voolu tagasi reservuaari. Hüdrosüsteemi töörõhk mõjub reguleerimiskolvi vasakpoolsele ots-pinnale. Kuni vedeliku rõhust põhjustatud jõud Fp on väiksem kui vedru elastsusjõud FF püsib süsteem selel 4.30 näidatud asendis ja rõhud reguleerimissilindrites on võrdsed Töörõhu kasvades suureneb jõud Fp ja regulaatori kolb surutakse paremale, reguleeriv kolb avab vedeliku voolu reservuaari, põhjustades rõhu languse suuremas reguleerimissilindris. Kuna väiksemas silindris on rõhk endine nihkub staator paremale. Jõud tasakaalustuvad kui väiksema silindri ristlõike pindala korrutis rõhuga silindris on võrdne suurema silindri ristlõikepindala ja rõhu korrutisega silindris . Pumba tootlikkus muutub nulliks ja töörõhk hüdro-süsteemis püsib konstantne. Kui on saavutatud maksimaalne töörõhk, püsivad sellise regulaatori kasutamisel hüdrosüsteemi energiakaod minimaalsed ja kuna ei toimu ka töövedeliku soojenemist on energiakulu väike. Hüdrosüsteemi töörõhu vähenedes toimub regulaatoris ja pumbas vastupidine protsess. Kasutades antud põhimõtet võib labapumpades kasutada: - vooluhulga regulaatorit - rõhu/ vooluhulga regulaatorit - võimsuse regulaatorit. 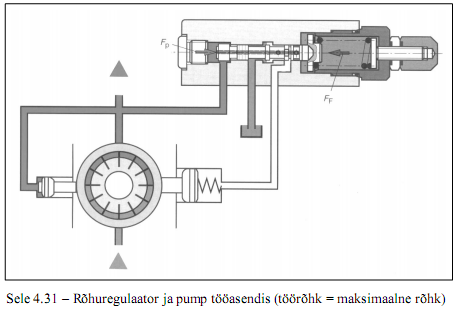 Vooluhulga reguleerimine Vooluhulga reguleerimisel muudetakse pumba tootlikkus konstantseks. Selleks, et hinnata vedeliku vooluhulka, kasutatakse torustikku ühendatud vooluventiili (takistit), millel tekkiva rõhulanguse järgi hinnatakse pumba tootlikkust. Rõhk enne vooluventiili juhitakse reguleeriva kolvi vasakule poole. Sama rõhk on ka väiksemas reguleerimis-silindris. Rõhk peale drosselit (madalam kui rõhk enne drosselit) juhitakse reguleeriva kolvi paremale poole. Jõud regulaatori kolvile on tasakaalus, nagu ka reguleerivate silindrite tekitatud jõud. Regulaatori juhtpilu X kaudu toimub pidev vedeliku vool reservuaari tekitades suuremas silindris teatava rõhu, ning pumba staator püsib stabiilses asendis. Kui vähendada drosseli takistust väheneb rõhulangus drosselis vedru nihutab regulaatori kolbi vasakule vedeliku vooluhulk läbi pilu X väheneb, suureneb rõhk suuremas silindris, staator nihkub vasakule ja pumba töömaht (tootlikkus) kasvab. Vooluhulga suurenemise tulemusel suureneb jällegi rõhu langus (p) drosselil ja tekib uus tasakaaluasend. Nii rõhu kui vooluhulga regulaatoreid saab juhtida nii mehaaniliselt, hüdrauliliselt kui ka elektriliselt. Rõhu ja vooluhulga regulaatori koos kasutamine võimaldab luua majandus-likult eriti efektiivseid hüdrosüsteeme. 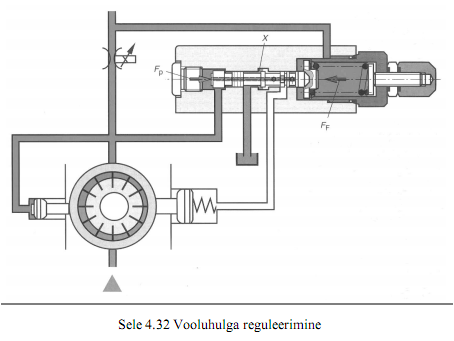 |
Seaded |
|
Viimane uuendus: 17.10.2012 20:22:48 |

Kontakt |
| Pärnumaa Kutsehariduskeskus |
powered by cmsimple.dk
- template by cmsimple-styles.com |