Pneumaatilised juhtimiskomponendidSissejuhatus Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskomponendid, millede ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse, suruõhu rõhu reguleerimine ja muude juhtimis-operatsioonide täitmine pneumosüsteemides. Juhtimiskomponendid on: 1. Pneumojaotid ehk suunaventiilid 2. Drosselid ehk vooluventiilid ehk kägiventiilid 3. Reduktsiooniklapid 4. Sulgurklapid 5. Taimerid 6. Rõhutundlikud elemendid 7. Sammjuhtimismoodulid 8. jne. Pneumojaotid ehk suunaventiilid Pneumojaotid on pneumokomponendid, mille abil muudetakse suruõhu liikumisteekonda pneumotorustikes. Pneumojaotite tingmärgid Pneumoskeemides kujutatakse pneumojaoteid tingmärkidena, milles ei kajastu pnumojaoti ehitus, vaid ainult nende poolt täidetav funktsioon. Nullasendiks nimetatakse (nt. vedruga tagastuval pneumojaotil) seda asendit, milles paiknevad pneumojaoti liikuvad osad, kui pneumojaoti ei ole rakendunud olekus. Lähteasendiks nimetatakse asendit, millisesse liiguvad pneumojaoti liikuvad osad, kui pneumoskeem, millesse ta on lülitatud, ühendatakse pneumovõrku ja millest algab pneumoseadme töötsükkel. 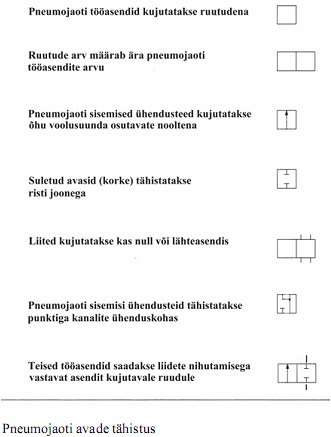 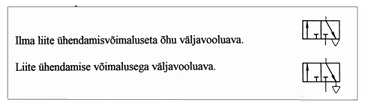 Selleks, et määratleda pneumojaoti avasid, kasutatakse järgnevaid avade tähistussüsteeme: 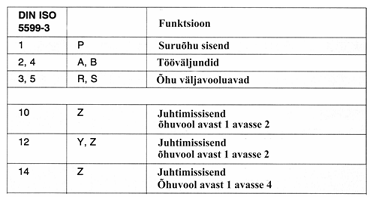 Pneumojaoti tähistuses näitab esimene number pneumojaoti avade arvu (väljaarvatud juhtimisavad) ja teine number pneumojaoti tööasendite arvu. Näide: 3/2 pneumojaoti 3 ava 2 asendit 4/3 pneumojaoti 4 ava 3 asendit 6.2.3 Pneumojaotite juhtimist kajastavad tingmärgid Juhtimisviisi poolest eristatakse: Pideva juhtimisega. Pneumojaoti on rakendunud asendis nii kaua kuni kestab juhttoime: kas manuaalne, pedaaliga, mehaaniline, pneumaatiline, elektriline (lülitus lähteasendisse toimub kas manuaalselt või vedruga). Neid pneumojaoteid nimetatakse ka monostabiilseteks. Impulssjuhtimisega. Pneumojaoti viimiseks uude asendisse mõjutatakse jaotit juhtsignaaliga suhteliselt lühikese aja vältel (impulsiga). Peale juhtsignaali lõppemist jääb jaoti uude asendisse. Pneumojaoti muudab oma asendit alles uue juhtimissignaali toimel. Neid pneumojaoteid nimetatakse ka bistabiilseteks. Kokkuvõte pneumojaotite tingmärkidest: 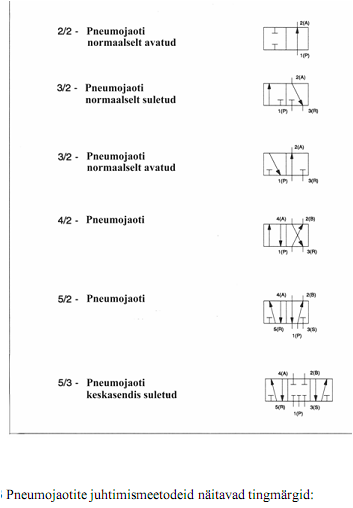 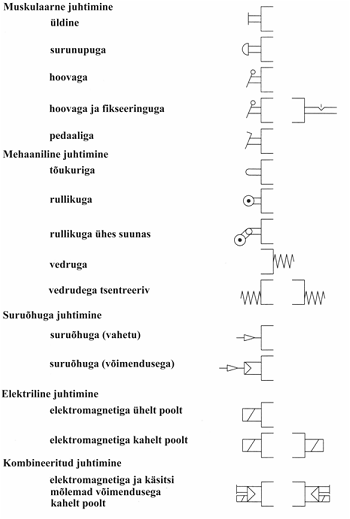 6.2.4 Pneumojaotite konstruktsioone. Pneumojaoti konstruktsioon määrab ära pneumojaoti tööea, tema juhtimise, liidete konstruktsiooni ja mõõtmed. Kuigi pneumojaotite konstruktsioon areneb pidevalt on praegu laiemalt kasutusel järgmist tüüpi pneumojaotid. 1. Klappjaotid: - kuulklapiga, - plaatklapiga. 2. Siiberjaotid: - kolviga, - plaadiga, - pöördsiibriga jaotid. Klappjaotid Antud pneumojaotites toimub õhu liikumissuuna muutmine avatava ja suletava kuulklapi või plaadi toimel. Klapi tihendamine toimub üldjuhul elastsete tihendite kasutamisega. Seda tüüpi pneumojaotites on suhteliselt vähe liikuvaid detaile, tänu millele on nende tööiga pikk, ning nad on suhteliselt tundetud mehaanilistele lisanditele suruõhus. Juhtimiseks vajalik jõud on suhteliselt suur, kuna pneumojaoti asendi muutmiseks tuleb ületada sisseehitatud vedru ja juhitava õhuvoolu rõhust tingitud jõud. Kuulklapiga pneumojaotid on oma ehituselt lihtsad, väiksemõõtmelised ja seetõttu ka odavad. 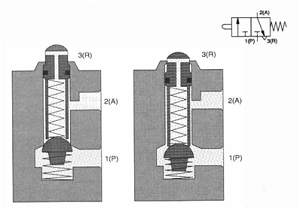 Kuulklapiga 3/2 pneumojaoti (normaalselt suletud) Lähteasendis (sele 61) surub vedru kuuli pesasse, vältides sellega suruõhu läbivoolu avast 1(P) tööavasse 2(A). Samal ajal on õhul vaba läbivool tööavast 2(A) väljavooluavasse 3(R). Juhttoimel avaneb kuulklapp, sulgedes samal ajal õhu läbivoolu tööavast 2(A) väljavooluavasse 3(R), ning avades õhu läbivoolu avast 1(P) tööavasse 2(A). 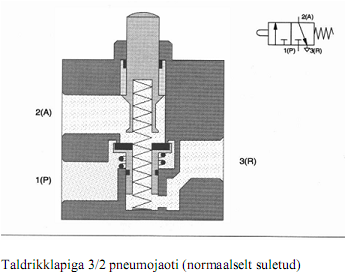 Analoogiliselt funktsioneerivad ka taldrikklapiga pneumojaotid seledel 62 ja 63. Antud pneumojaotite headeks omadusteks on hea ja lihtne klappide tihendus. Samuti on nende rakendumisaeg lühike ja vaatamata tõukuri lühikesele liikumisulatusele ka hea õhu läbivoolavus. Analoogiliselt kuulklappidele ei ole nad eriti tundlikud õhu puhtuse suhtes ning omavad pikka tööiga. Antud pneumojaotid võivad olla kahte eri tüüpi: normaalselt suletud ja normaalselt avatud. Normaalselt suletud pneumojaoti puhul (sele 62) on juhttoime puudumisel suruõhu läbivool tööavast 2(A) väljavooluavasse 3(R) avatud, õhu läbivool sissevooluavast 1(P) tööavasse 2(A) aga suletud. Juhttoimel sulgub suruõhu läbivool tööavast 2(A) väljavooluavasse 3(R) ja avaneb õhu läbivool sissevooluavast 1(P) tööavasse 2(A) . 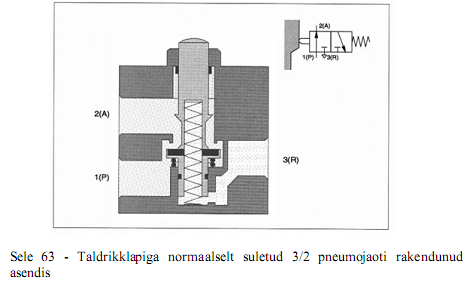 Normaalselt avatud pneumojaoti puhulon juhttoime puudumisel õhu läbivool sissevooluavast 1(P) tööavasse 2(A) avatud. Samal ajal on suletud õhu läbivool tööavast 2(A) väljavooluavasse 3(R). Juhttoimel sulgub õhu läbivool sissevooluavast 1(P) tööavasse 2(A) ja avaneb õhu läbivool tööavast 2(A) väljavooluavasse 3(R). 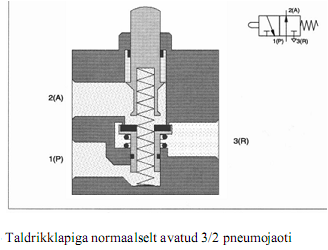 Kahepoolse toimega pneumosilindrite juhtimiseks on vajalikud juba keerukama konstruktsiooniga pneumojaotid (nt. 4/2 jne.). Üks võimalikest 4/2 pneumojaoti konstruktsioonidest on esitatud (lähteasendis) ja (rakendunud asendis). 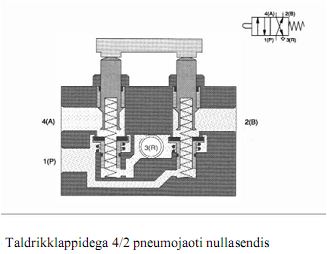 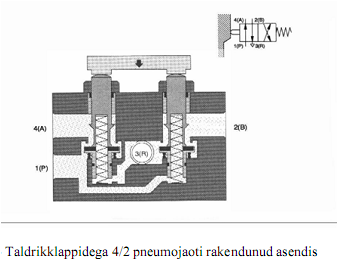 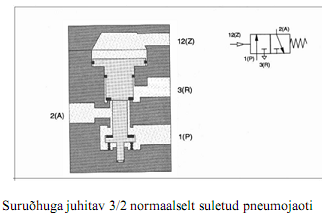 Siiberjaotid Võrreldes klappjaotitega iseloomustab siiberjaoteid suurem läbivool, kuid samal ajal on neil suurem ümberlülitumise aeg. Samuti ei ole nad nii hea tihendusega kui klappjaotid. Antud pneumojaotites on kasutusel liuguvad tihendid. Selleks, et vähendada tihendite kulumisest põhjustatud suruõhu leket, kasutatakse nendes pneumojaotites ühelt poolt õhuvoolu juhtimist siibriga, kuid tihenduses kasutatakse klappjaotite juures kasutatavaid konstruktsioonipõhimõtteid. Seledel 69, 70, 71, 72, 73, 74 on esitatud mitmeid erineva ehitusega siiberjaoteid. 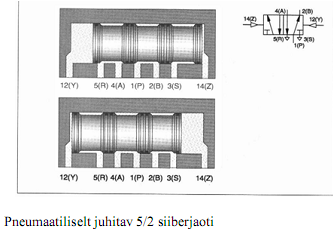 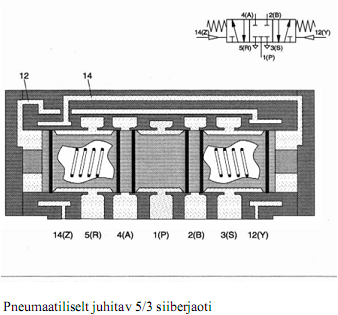 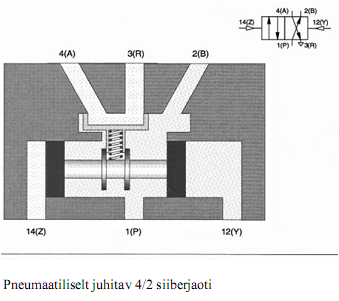 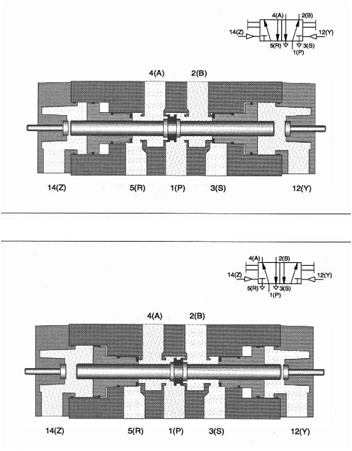 Toodud pneumojaotis toimub õhuvoolu suuna juhtimine küll siibriga, kuid tihendamisel kasutatakse klappide põhimõtteid 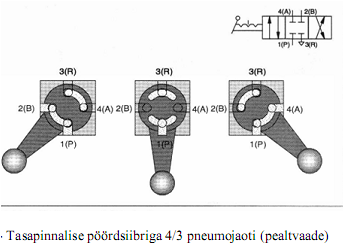 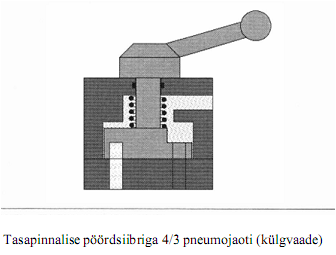 Pneumojaotite juhtimine Pneumojaotites kasutatakse väga erinevaid juhtimismeetodeid: mehaaniline, pneumaatiline, elektromagnetiga või kombineeritud (kasutatakse erinevaid meetodeid nt. juhtimine pneumaatiliselt ja mehaaniliselt). Kasutaja vaatevinklist on oluline eristada vahetut juhtimist ja võimendusega juhtimist (vt. Pneumojaotite juhtimist kajastavad tingmärgid). Vahetu juhtimise korral kantakse juhttoime pneumojaoti klappidele või siibritele üle vahetult. Antud juhtimise puuduseks on see, et suuremate pneumojaotite juhtimiseks vajalik juhtimisenergia peab olema suhteliselt suur (jõud nuppude või tõukurite liigutamiseks, elektromagneti võimsus jne). Samal ajal on aga plussiks see, et nad on tundetud tüüritava õhu rõhu suhtes (vt. eelnevatel seledel esitatud pneumojaotid). Võimendusega juhtimise korral juhitakse nn abijaotit, mille kaudu omakorda toimub pneumojaoti juhtimine. 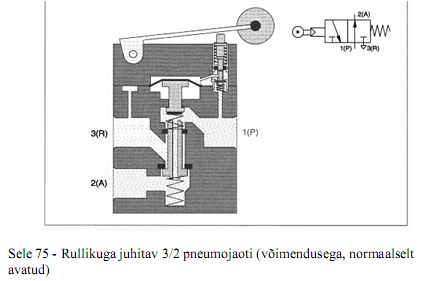 Antud pneumojaotis juhitakse rullikuga abipneumojaotit, mis omakorda juhib pneumaatiliselt juhitavat 3/2 pneumojaotit. Sellise konstruktsiooni korral väheneb märgatavalt juhtimiseks vajalik energia. Antud tüüpi juhtimisega pneumojaotite kasutamisel tuleb arvestada, et nad on tundlikud juhitava õhu rõhu väärtusele, sest et juhtimiseks vajalik õhk on sama mis juhitav õhk. Rõhu langemisel alla kriitilise piiri ei piisa sellest enam pneumojaoti juhtimiseks. Selleks, et seda vältida on mõningatel seda tüüpi pneumojaotitel võimalus sisestada juhtrõhk pneumojaotisse eraldi kanalist. 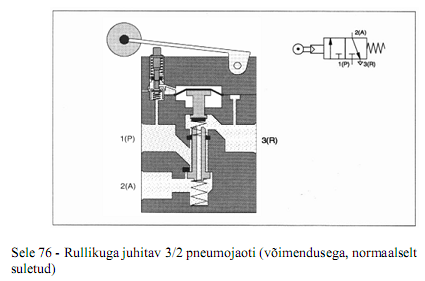 Drosselid ehk vooluventiilid Drosseleid (paralleelselt on käibel ka terminid „kägiventiil“ ja vooluventiil“) kasutatakse läbivoolava õhu vooluhulga reguleerimisel, näiteks pneumaatilise täituri liikumiskiiruse (pneumosilinder) ja pöörlemissageduse (pneumomootor ja pöördsilinder) vähendamiseks. Drosselid võivad olla nii mittereguleeritavad kui ka reguleeritavad. Üks võimalikest drosseli konstruktsioonidest on esitatud. 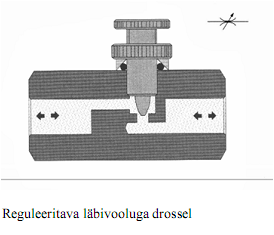 Suruõhu läbivoolu reguleerimiseks kasutatakse ka erinevaid drosselite konstruktsioone, kus lisaks drosselile on kasutusel ka möödavooluklapp, mis annab võimaluse reguleerida õhu läbivoolu ainult ühes suunas ja laiendab drosselite kasutamismeetodeid. Sageli tekib vajadus reguleerida õhu läbivoolu sõltuvalt muutuvatest tingimustest süsteemis. Üks võimalus selleks on esitatud , kus läbivoolu reguleerimine toimub mehaaniliselt hoova asendi muutmisega. 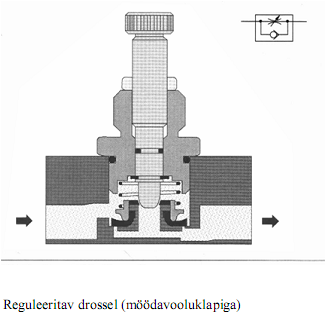 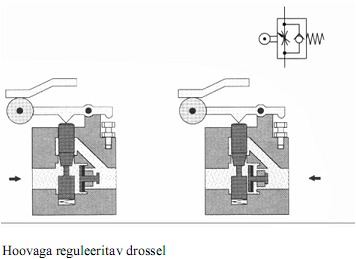 Praktikas võib kohata ka muid kombinatsioone drosseli kasutamisega, näiteks heli summuti koos drosseliga, drossel pneumaatilises taimeris jne. Mittetagasivooluklapp Tagasilöögiklapid on pneumaatikakomponendid, mis võimaldavad õhu liikumist ainult ühes suunas, liikumissuuna muutumisel vastupidiseks klapp sulgub ja suleb õhu läbivoolu. Õhu teekonna sulgemine võib toimuda kuuliga, klapiga või membraaniga, kas tänu rõhuvahele või täiendava vedru abil. Üks võimalikke vedruga tagasilöögiklapi konstruktsioone on esitatud. 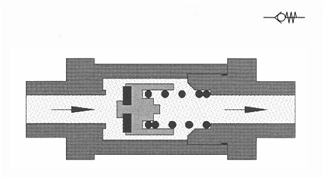 6.5 Loogikafunktsioonide realiseerimine pneumaatikas Loogikaelementide funktsioneerimise kirjeldamiseks kasutatakse tõeväärtus- tabelit, milles kajastuvad seosed antud funktsiooni realiseeriva elemendi sisendite ja väljundi vahel. Tinglikult tähistatakse tõeväärtustabelis signaali (suruõhu) olemasolu "1"-ga ja puudumist "0"- ga. Pneumaatiline "JA" ( "AND") element "JA" funktsiooni realiseeriva pneumaatilise loogikaelemendi struktuur on toodud pildil, ning tema funktsioneerimist kajastav tõeväärtustabel on esitatud pildil. 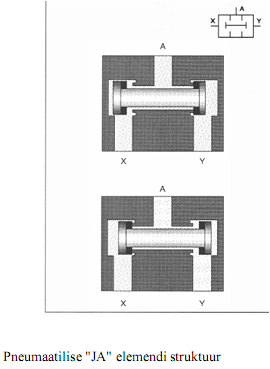 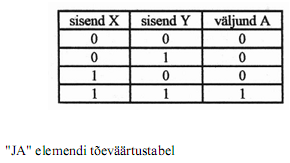 Kokkuvõtlikult tähendab see seda, et "JA" elemendi väljundis on signaal ainult siis kui signaal on mõlemal tema sisendil. "JA" elemendi kasutamise näide on esitatud selel 83, kus pneumoskeemil esitatud pneumosüsteemis toimub pneumosilindri 1.0 liikumine plusssuunas ainult siis, kui pneumojaotid 1.2 ja 1.4 on rakendunud asendis. 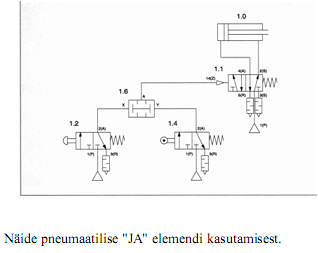 Pneumaatiline "VÕI" ("OR") element 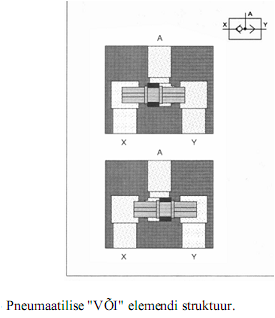 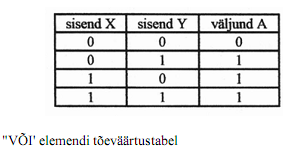 Kokkuvõtlikult tähendab see et "VÕI” elemendi väljundis on signaal siis, kui signaal on vähemalt ühel või mõlemal tema sisendil. "VÕI” elemendi kasutarnise näide on esitatud selel 86, kas pneumoskeemil esitatud pneumossüsteemis toimub pneumosilindri 1.0 liikumine plusssuunas ainult siis kui pneumojaotid 1.2 või 1.4 eraldi või mõlemad korraga on rakendunud asendis. 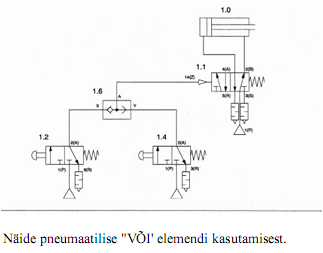 Kiirväljalaskeklapp Kiirväljalaskeklappi kasutatakse juhul, kui on vaja suurendada pneumo-silindri kolvi liikumiskiirust. Antud klappide kasutamine kiirendab kolvi liikumiskiirust sellel teel, et pneumosilindrist väljajuhitav õhk juhitakse takistavatest elementidest ( lõdvik, pneumojaoti ) mööda. Kiirväljalaskeklapp ühendatakse võimalikult lähedale pneumosilindrile (vahetult pneumosilindri korpusele), nii et klapi ava 2(A) ühendatakse pneumosilindri avaga ja avasse 1(P) juhitakse silindrisse antav õhk. Suruõhu liikumisel pneumosilindrisse sulgeb taldrikklapp õhu väljavoolu avasse 3(R) võimaldades sama1 ajal õhu läbipääsu avasse 2(A). Õhu liikumisel pneumosilindrist välja avaneb õhu väljavool avasse 3(R). 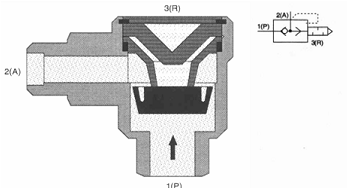 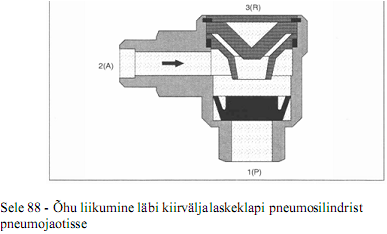 Kiirväljalaskeklapi kasutamist illustreerib sele 89, kus esimeses näites kiirendatakse ühepoolse toimega pneumosilindri kolvi miinussuunalist liikumist, teisel juhul aga kahepoolse toimega pneumosilindri kolvi plusssuunalist liikumist. 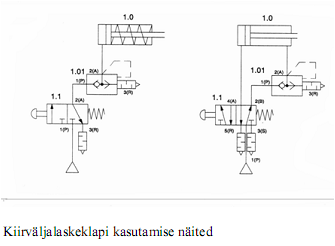 Pneumaatilised taimerid Selleks et pneumoseadmetes oleks võimalik muuta seadme töö ajalisi parameetreid nagu ajalist viivitust, pneumosignaalide ajalisi parameetreid jne., kasutatakse pneumaatilisi taimereid. Pneumaatiline taimer koosneb pneumojaotist (tavaliselt 3/2), möödavoolu- klapiga reguleeritavast drosselist ja väikesest suruõhu reservuaarist. Taimeri töödiagrammi määrab ära pneumojaoti tüüp ja möödavooluklapi ühendamise viis. Järgnevalt vaatame erinevate pneumaatiliste taimerite töödiagramme ja töötamispõhimõtteid. Suruõhk juhitakse taimeri sisendisse 1 (P). Sõltuvalt taimeris asetsevast pneumojaotist väljundis 2 (A) suruõhk puudub või on suruõhk (seled 93, 94). Juhtrõhk antakse taimeri sisendile 10 (Z). Läbi drosseli toimub suruõhu sissevool suruõhu reservuaari, mille tagajärjel rõhk reservuaaris hakkab tõusma kiirusega, mille määravad ära reservuaari maht ja reguleeritava drosseli parameetrid. Rõhu tõustes lülitumiseks vajaliku väärtuseni p1 toimub pneumojaoti ümberlülitus. Juhtrõhu eemaldamisel taimeri sisendilt 10(Z) toimub taimeri lülitumine algasendisse. 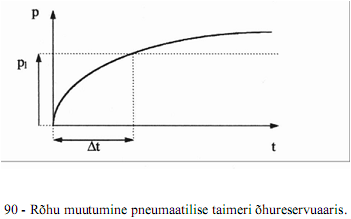 NB! Aja ∆t jooksul ei tohi juhtrõhku sisendilt 10 (Z) eemaldada, sest sellisel juhul lülitub taimer algasendisse tagasi enne ajavahemiku ∆t lõppemist. 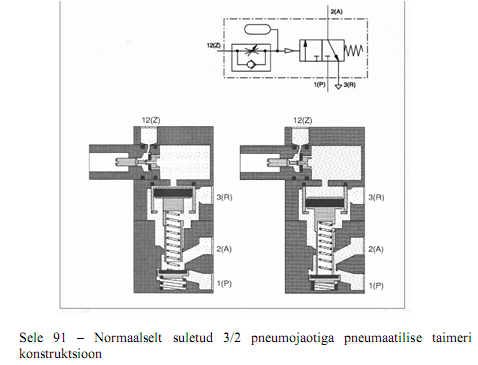 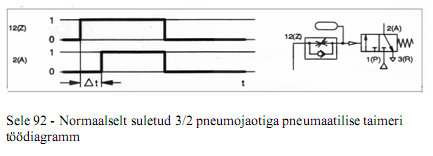 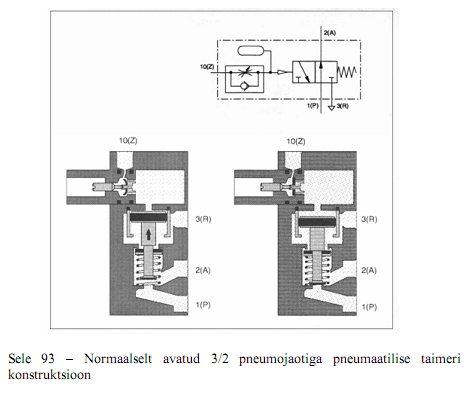 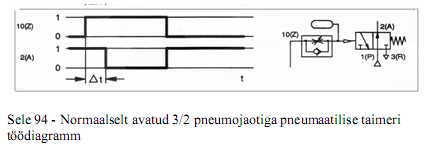 Möödavooluklapi ühendussuuna muutmisel vastupidiseks muutub pneumaatilise taimeri töödiagramm selliselt, et taimeri sisselülitumine toimub koheselt peale juhtrõhu andmist taimeri sisendile 10 (Z), kuid lülitumine algasendisse toimub aja ∆t möödumisel. 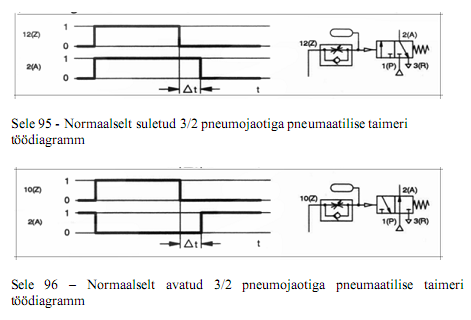 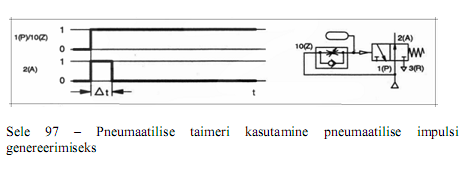 Muudetava rakendumislävega rõhutundlik element Selleks, et oleks võimalik juhtida pneumoajamit sõltuvalt ajamile rakendatud koormusest, kasutatakse pneumojaoteid, millede rakendumislävi on reguleeritav. Signaaliks sellisele elemendile kasutatakse pneumoajamisse antavat suruõhku, mille rõhk on otseses sõltuvuses ajamile rakendatud koormusest. Kui koormus pneumoajamile suureneb, kasvab ka rõhu väärus, mille jõudmisel reguleeritud tasemeni toimub pneumojaoti asendi muutus. Lähteasendisse läheb pneumojaoti siis, kui juhtrõhk eemaldada. Antud elemendi konstruktsioon ja skeemitähis on esitatud. 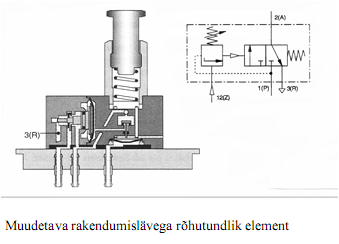 |
Seaded |
|
Viimane uuendus: 17.10.2012 20:22:48 |

Kontakt |
| Pärnumaa Kutsehariduskeskus |
powered by cmsimple.dk
- template by cmsimple-styles.com |